






- Teléfono: 0086-021-37901188
- E-mail: info@triowin.com
- whatsapp: +8613301885621
- wechat: +8613301885621
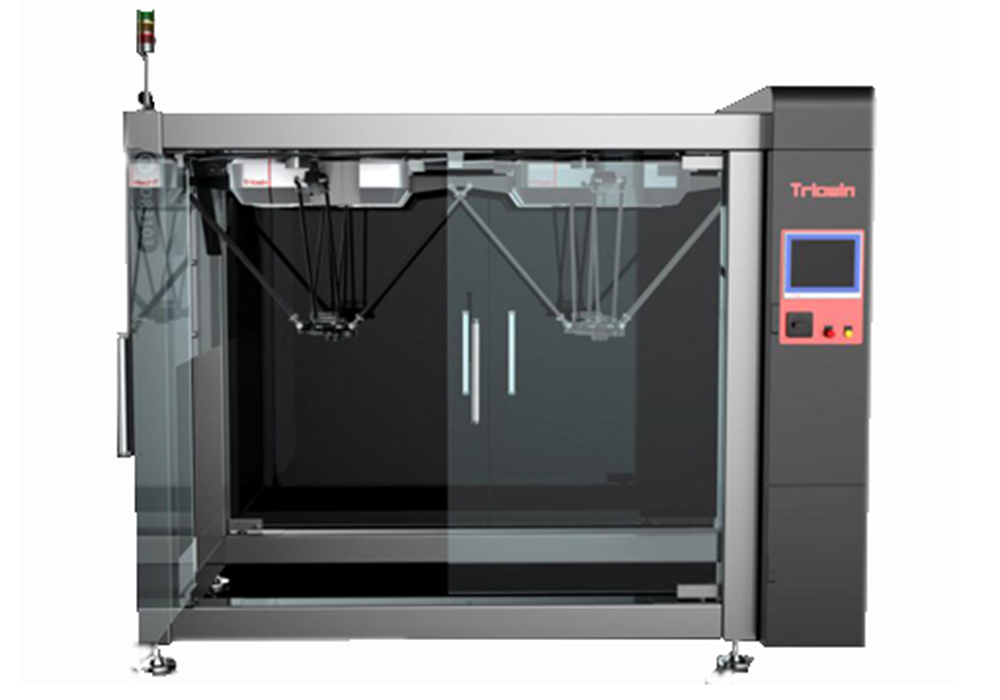
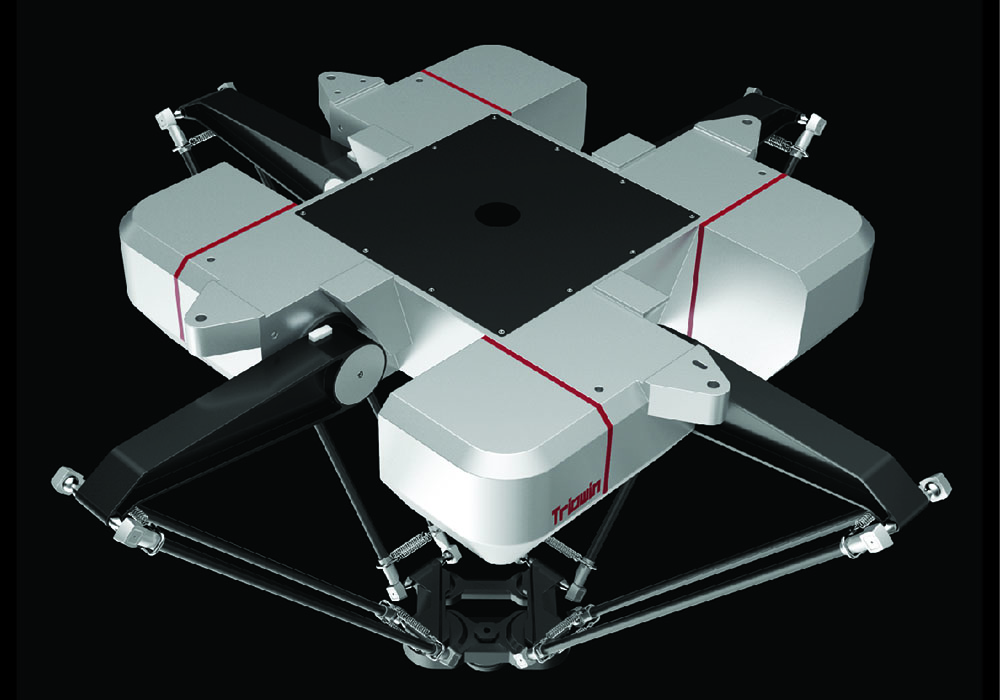
El robot de recogida en paralelo es un robot de simetría espacial con 4 grados de libertad de modelado dinámico, ampliamente utilizado para la colocación, recogida y empaquetado de recipientes a alta velocidad. El diseño de paralelogramo cerrado de cadena ramificada puede asegurar que el robot puede hacer el movimiento (tres traslaciones y una rotación) de forma rápida, estable y precisa.
El robot tiene el rendimiento dinámico más superior:
1.1.Incrementa el espacio de trabajo;
2.2.Mejora la velocidad y la aceleración;
3.3.Mejora la rigidez de la estructura cuadrilátera;
4.Reduce de forma efectiva el mantenimiento del robot.
El robot puede ser controlado por una variedad de sistemas de control de movimiento estándar en la industria.
El robot puede realizar la búsqueda aleatoria de productos líquidos mixtos con el sistema visua
* El robot es adecuado para la recogida y colocación rápida de mercancías empaquetadas.
* La interfaz de abrazadera ISO es conveniente para usar las complejas abrazaderas y ventosas.
* Bajo coste de mantenimiento, monitorización remota y mantenimiento a través de la red.
* Control de visión inteligente con múltiples ángulos.
Eficiencia de trabajo
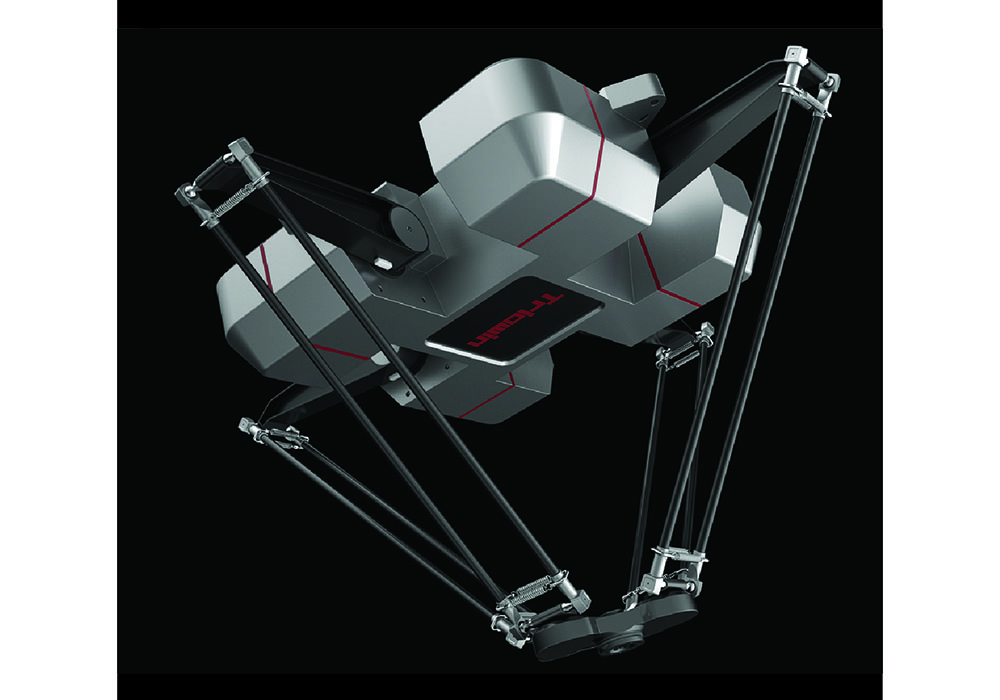
La serie TPR de robots, que tiene actuadores lineales únicos, con un diseño de brazo que ahorra energía, una interfaz de usuario simple y mangos dirigidos adecuados, puede personalizarse para ofrecer soluciones robóticas profesionales a diferentes líneas de producción y materiales para nuestros clientes. Su precisión superior, velocidad, una alta eficiencia y un rendimiento estable hacen que un robot trabaje con varias líneas de producción, la carga útil puede ser de hasta 120kg – 300kg, y también puede aplicarse a alimentación, productos químicos, grano y aceite, alimentos, materiales de construcción, cosméticos, licor, bebidas, farmacéuticos, aparatos del hogar, electrónica 3C y otras industrias.|
|
Standard Cycle(s) |
Extended Cycle(s) |
|
Mass(kg) |
(sec) |
(sec) |
|
0.1 |
0.30 |
0.46 |
|
1.0 |
0.36 |
0.47 |
|
2.0 |
0.37 |
0.52 |
|
4.0 |
0.41 |
0.58 |
|
6.0 |
0.43 |
0.61 |
|
Robot Model |
PicKING(TDR4106-1300) |
|
Controlled |
4axes |
|
Motion Range |
Diameter:1300mm Height:500mm |
|
Accuracy |
±0.1mm |
|
Max Load |
6Kg |
|
Maximum Speed |
200times/minute |
|
Maximum Acceleration |
150meter/second |
|
Weight |
128Kg |
|
Drive Method |
Electrical Drive |
|
Working Condition |
Temperature:0-45°C |
